Distance Joint
Distance Joint keeps the origins of the constraint actors within a certain range of distance. The range may have both upper and lower bounds.
Properties
| Property | Description |
|---|---|
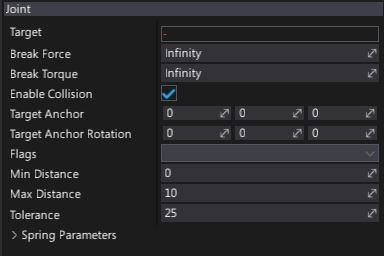
| Target | The target actor for the joint. It has to be RigidBody or CharacterController. |
| Break Force | Determines the maximum force the joint can apply before breaking. Broken joints no longer participate in physics simulation. |
| Break Torque | Determines the maximum torque the joint can apply before breaking. Broken joints no longer participate in physics simulation. |
| Enable Collision | Determines whether a collision between the two bodies managed by the joint is enabled. |
| Enable Auto Anchor | Determines whether use automatic target anchor position and rotation based on the joint world-space frame (computed when creating joint). |
| Target Anchor | This is the relative pose which locates the joint frame relative to the target actor. |
| Target Anchor Rotation | This is the relative pose rotation which locates the joint frame relative to the target actor. |
| Flags | Controls joint behaviour. |
| Min Distance | The minimum distance must be no more than the maximum distance. Used only when MinDistance flag is set. |
| Max Distance | The maximum distance must be no less than the minimum distance. Used only when MaxDistance flag is set. |
| Tolerance | The error tolerance of the joint. The distance beyond the joint's [min, max] range before the joint becomes active. Default: 25, Range: [0.1, float.MaxValue]. |
| SpringParameters | The spring parameters. Used only when Spring flag is set. See SpringParameters to learn more. |